 3:22
3:22
2026-04-28 11:46
 3:51
3:51
3:51
2026-03-05 17:51
 44:60
44:60
44:60
2026-05-25 13:03
 2:07:08
2:07:08
2:07:08
2023-11-12 16:59
 2:42:53
2:42:53
2:42:53
2026-05-19 21:15
 55:28
55:28
55:28
2026-05-21 11:41
 2:31:45
2:31:45
2:31:45
2026-05-22 22:20
 1:45:59
1:45:59
1:45:59
2026-05-18 14:38
 2:40:57
2:40:57
2:40:57
2025-12-17 16:07
 1:41:28
1:41:28
1:41:28
2024-04-04 11:22
 2:04:12
2:04:12
2:04:12
2024-01-18 11:08
 1:00:29
1:00:29
1:00:29
2026-05-26 09:01
 3:23:50
3:23:50
3:23:50
2025-12-16 04:43
 3:57:45
3:57:45
3:57:45
2024-12-23 03:29
 39:30
39:30
39:30
2026-05-25 23:50
 23:57
23:57
23:57
2026-05-26 06:37
 1:18:55
1:18:55
1:18:55
2026-05-25 20:32
 2:49:52
2:49:52
![Шахзод Ускенбаев - Сенсиз (Премьера клипа 2026)]() 4:52
4:52
![Азамат Исенгазин - Ты там, где я (Премьера клипа 2026)]() 3:12
3:12
![Рейсан Магомедкеримов - Роза алая (Премьера клипа 2026)]() 3:52
3:52
![Артур Бесаев - Словно волк (Премьера клипа 2026)]() 3:32
3:32
![Xhensila – Gjuma (Official Video 2026)]() 2:18
2:18
![SHAXO, ILIMA - Чувства (Премьера клипа 2026)]() 2:34
2:34
![Группа КАРОЛИНА - Розовые краски (Премьера клипа 2026)]() 4:06
4:06
![Murat Gamidov - Лилия (Премьера клипа 2026)]() 2:34
2:34
![Сергей Одинцов - Моя недотрога (Премьера клипа 2026)]() 3:40
3:40
![Винтаж - Малахит (Премьера клипа 2026)]() 3:44
3:44
![Фати Царикаева - Моё лето (Премьера клипа 2026)]() 2:22
2:22
![Cvetocek7 - Близкий человек (Премьера клипа 2026)]() 2:46
2:46
![Руслан Добрый - Итальянка (Премьера клипа 2026)]() 2:14
2:14
![SEREBRO - Мало огня (Премьера клипа 2026)]() 1:52
1:52
![StaFFорд63 - Наступит день (Премьера клипа 2026)]() 3:04
3:04
![Arujan - Koz tiydime (Премьера клипа 2026)]() 3:24
3:24
![Дана Лахова - Найдём нашу любовь (Премьера клипа 2026)]() 2:10
2:10
![SHAXO - Паранойя (Премьера клипа 2026)]() 2:22
2:22
![Mavik, Лолита - Журналистка (Премьера клипа 2026)]() 2:46
2:46
![Сергей Одинцов - Всю любовь тебе отдам (Премьера клипа 2026)]() 3:50
3:50
![Крик 7 | Scream 7 (2026)]() 1:53:59
1:53:59
![Семья в аренду | Rental Family (2025)]() 1:49:55
1:49:55
![Спрингстин. Избавь меня от небытия | Springsteen: Deliver Me from Nowhere (2025)]() 1:59:36
1:59:36
![Пицца фильм | Pizza Movie (2026)]() 1:37:12
1:37:12
![Восстание зловещих мертвецов | Evil Dead Rise (2023)]() 1:36:30
1:36:30
![В мгновение ока | In the Blink of an Eye (2026)]() 1:34:15
1:34:15
![Нескромные | Splitsville (2025)]() 1:44:43
1:44:43
![Йети | The Yeti (2026)]() 1:33:08
1:33:08
![Супер Марио: Галактическое кино | The Super Mario Galaxy Movie (2026)]() 1:38:18
1:38:18
![Смертельно прекрасна | Pretty Lethal (2026)]() 1:30:46
1:30:46
![Хищный рывок | Thrash (2026)]() 1:26:13
1:26:13
![Завещание Анны Ли | The Testament of Ann Lee (2025)]() 2:16:48
2:16:48
![Майк и Ник и Ник и Элис | Mike & Nick & Nick & Alice (2026)]() 1:47:10
1:47:10
![Проект «Конец света» | Project Hail Mary (2026)]() 2:36:35
2:36:35
![Тепло наших тел | Warm Bodies (2013)]() 1:37:49
1:37:49
![Супер Марио: Галактическое кино | The Super Mario Galaxy Movie (2026)]() 1:38:05
1:38:05
![Я иду искать 2 | Ready or Not 2: Here I Come (2026)]() 1:47:56
1:47:56
![Микки 17 | Mickey 17 (2025)]() 2:16:60
2:16:60
![Грозовой перевал | Wuthering Heights (2026)]() 2:16:14
2:16:14
![Последствия | Outcome (2026)]() 1:23:53
1:23:53
![Роботы-пожарные]() 12:31
12:31
![Корги по имени Моко. Новый питомец]() 3:28
3:28
![Пип и Альба. Приключения в Соленой Бухте! Сезон 1]() 11:02
11:02
![Тодли Великолепный!]() 3:15
3:15
![Папа Супергерой Сезон 1]() 4:28
4:28
![Герой внутри]() 1:09
1:09
![Пакман в мире привидений]() 21:37
21:37
![Корги по имени Моко. Волшебный мир снов]() 0:50
0:50
![Мультфильмы военных лет | Специальный проект к 80-летию Победы]() 7:20
7:20
![Синдбад и семь галактик Сезон 1]() 10:23
10:23
![Хвостатые песенки]() 7:00
7:00
![Панда и петушок Лука]() 12:12
12:12
![Салон дядюшки Брэда]() 1:02
1:02
![Врумиз. 1 сезон]() 13:10
13:10
![Паровозик Титипо]() 13:42
13:42
![Тайны Медовой долины]() 7:01
7:01
![Киддеты]() 0:41
0:41
![Рэй и пожарный патруль Сезон 1]() 13:27
13:27
![Ну, погоди! Каникулы]() 7:09
7:09
![Супер Зак]() 11:38
11:38
![Франкенштейн | Frankenstein (2025)]() 2:32:29
2:32:29
![Снова в деле (2025) Netflix]() 1:54:23
1:54:23
![50 клипов шансона]() 3:12:53
3:12:53
![Смешарики (большой сборник)]() 3:25:27
3:25:27
![Лучшие в Аду (2022)]() 1:49:08
1:49:08
![Маша и Медведь. Серия 1. Первая встреча]() 6:36
6:36
![Ми–Ми–Мишки 💫 Звездная история 🙃 Все серии ✨ Мультики для детей]() 2:10:31
2:10:31
![Форсаж 6 | Furious 6 (2013)]() 2:11:07
2:11:07
![Аватар: Путь воды (2022)]() 3:12:39
3:12:39
![Мир в огне (все серии) 4K]() 12:26:36
12:26:36
![Винни-Пух. 1969 год.]() 41:23
41:23
![Зверополис 2 | Zootopia 2 (2025)]() 1:47:36
1:47:36
![Цып-Цып - Мультики для детей - Все серии подряд!]() 1:45:28
1:45:28
![MAUR - Полетела (Премьера клипа 2025)]() 2:53
2:53
![Домовёнок Кузя]() 1:29:32
1:29:32
![Форсаж 9 | F9 (2021)]() 2:22:56
2:22:56
![Хищник: Планета смерти | Predator: Badlands (2025)]() 1:47:25
1:47:25
![Три Кота 🐱 Сборник серий подряд | Смотреть онлайн развивающие мультики и игры для детей и малышей]() 3:16:51
3:16:51
![28 лет спустя: Часть II. Храм костей | 28 Years Later: The Bone Temple (2026)]() 1:49:24
1:49:24
![Рыцарь семи королевств. Все серии]() 3:28:06
3:28:06
2:49:52

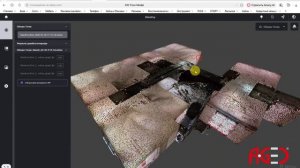
Скачать Видео с Рутуба по ссылке
| 256x144 | ||
| 424x240 | ||
| 640x360 | ||
| 848x480 | ||
| 1280x720 | ||
| 1920x1080 |
 4:52
4:52
2026-04-27 13:31
 3:12
3:12
2026-04-29 11:28
 3:52
3:52
2026-05-09 18:11
 3:32
3:32
2026-05-21 11:40
 2:18
2:18
2026-05-10 12:39
 2:34
2:34
2026-05-21 14:31
 4:06
4:06
2026-05-24 15:36
 2:34
2:34
2026-04-29 11:20
 3:40
3:40
2026-05-15 10:04
 3:44
3:44
2026-04-28 12:53
 2:22
2:22
2026-05-15 10:20
 2:46
2:46
2026-05-24 15:25
 2:14
2:14
2026-05-24 15:19
 1:52
1:52
2026-05-15 13:19
 3:04
3:04
2026-04-23 11:16
 3:24
3:24
2026-05-16 13:20
 2:10
2:10
2026-05-12 12:35
 2:22
2:22
2026-04-28 11:11
 2:46
2:46
2026-05-23 16:52
 3:50
3:50
2026-04-21 10:41
0/0
 1:53:59
1:53:59
2026-04-22 11:21
 1:49:55
1:49:55
2026-02-13 20:27
 1:59:36
1:59:36
2026-02-13 14:02
 1:37:12
1:37:12
2026-04-06 12:20
 1:36:30
1:36:30
2026-05-06 14:10
 1:34:15
1:34:15
2026-03-01 21:54
 1:44:43
1:44:43
2026-04-09 22:40
 1:33:08
1:33:08
2026-04-15 12:24
 1:38:18
1:38:18
2026-05-12 16:55
 1:30:46
1:30:46
2026-03-28 23:09
 1:26:13
1:26:13
2026-04-29 20:33
 2:16:48
2:16:48
2026-03-12 23:31
 1:47:10
1:47:10
2026-04-03 12:10
 2:36:35
2:36:35
2026-04-11 16:06
 1:37:49
1:37:49
2026-02-16 08:53
 1:38:05
1:38:05
2026-04-12 21:37
 1:47:56
1:47:56
2026-04-12 17:20
 2:16:60
2:16:60
2026-05-07 15:07
 2:16:14
2:16:14
2026-04-20 11:54
 1:23:53
1:23:53
2026-04-17 14:43
0/0
2021-09-23 00:12
 3:28
3:28
2025-01-09 17:01
2021-09-22 23:36
 3:15
3:15
2025-06-10 13:56
2021-09-22 21:52
 1:09
1:09
2026-04-03 12:21
 21:37
21:37
2024-11-28 17:35
 0:50
0:50
2026-05-07 17:13
 7:20
7:20
2025-05-03 12:34
2021-09-22 23:09
 7:00
7:00
2025-06-01 11:15
 12:12
12:12
2024-11-29 14:21
 1:02
1:02
2026-05-07 16:57
2021-09-24 16:00
 13:42
13:42
2024-11-28 14:12
 7:01
7:01
2022-03-30 17:25
 0:41
0:41
2026-05-07 15:39
2021-09-22 23:51
 7:09
7:09
2026-04-11 10:00
2021-09-22 22:07
0/0
 2:32:29
2:32:29
2025-11-17 11:22
 1:54:23
1:54:23
2025-01-18 20:05
 3:12:53
3:12:53
2022-12-22 16:10
 3:25:27
3:25:27
2025-01-24 05:04
 1:49:08
1:49:08
2022-10-20 11:01
2015-02-06 15:18
 2:10:31
2:10:31
2024-01-17 17:34
 2:11:07
2:11:07
2023-04-25 22:52
 3:12:39
3:12:39
2025-06-17 19:00
 12:26:36
12:26:36
2025-11-14 19:42
 41:23
41:23
2023-11-19 12:01
 1:47:36
1:47:36
2025-12-25 17:49
 1:45:28
1:45:28
2022-06-06 09:02
 2:53
2:53
2025-04-24 09:53
 1:29:32
1:29:32
2025-03-15 20:49
 2:22:56
2:22:56
2023-04-25 23:06
 1:47:25
1:47:25
2025-11-27 03:58
 3:16:51
3:16:51
2025-10-03 19:48
 1:49:24
1:49:24
2026-02-19 14:08
 3:28:06
3:28:06
2026-02-24 11:12
0/0