 1:21
1:21
2025-11-28 10:33
 35:09
35:09
35:09
2022-07-14 00:57
 10:36
10:36
10:36
КАК ВЫЖИВАЕТ НЕМОЛОДОЙ БУРЯТ НА ЗАГНИВАЮЩЕМ ЗАПАДЕ. Магазины хозтоваров. Приехал купить лестницу...(
2026-05-11 00:36
 9:06
9:06
9:06
2023-09-22 07:24
 2:18
2:18
2:18
2023-09-11 22:58
 1:01:04
1:01:04
1:01:04
2023-06-19 12:00
 18:45
18:45
18:45
2025-09-12 20:38
 6:34
6:34
6:34
2025-01-23 05:54
 4:33
4:33
4:33
2023-12-08 04:48
 9:09
9:09
9:09
2020-02-10 12:01
 14:53
14:53
14:53
2025-06-18 08:30
 2:23
2:23
2:23
2023-11-02 23:18
 2:17:37
2:17:37
2:17:37
2025-05-09 05:47
 20:32
20:32
20:32
2022-07-11 10:30
 2:54
2:54
2:54
2024-07-21 12:37
 10:34
10:34
10:34
2023-08-25 12:33
 13:10
13:10
![Ярослав Леонов - Майская роза (Премьера клипа 2026)]() 3:14
3:14
![Ислам Итляшев - Пиранья любовь (Премьера клипа 2026)]() 2:52
2:52
![Cvetocek7 - Неспокойно без тебя (Премьера клипа 2026)]() 2:34
2:34
![Sabi, MIA BOYKA - Базовый минимум (Премьера клипа 2026)]() 2:26
2:26
![Фати Царикаева - Моё лето (Премьера клипа 2026)]() 2:22
2:22
![Соня Белькевич, КРЕСТОВ - Станцуем (Премьера клипа 2026)]() 3:25
3:25
![KIDA - MENIME (Official Video 2026)]() 2:44
2:44
![Enrasta - Адьёс (Премьера клипа 2026)]() 3:45
3:45
![Сергей Завьялов - А ты не мучай (Премьера клипа 2026)]() 2:45
2:45
![Стас Михайлов, Люся Чеботина - Обнимай (Премьера клипа 2026)]() 3:40
3:40
![Руслан Шанов, Amina T - Не верну я (Премьера клипа 2026)]() 2:31
2:31
![Рустам Нахушев - Гуляй (Премьера клипа 2026)]() 3:20
3:20
![SEREBRO - Мало огня (Премьера клипа 2026)]() 1:52
1:52
![Ислам Мальсуйгенов, Зульфия Чотчаева - Заиграла любовь (Премьера клипа 2026)]() 2:15
2:15
![Arujan - Koz tiydime (Премьера клипа 2026)]() 3:24
3:24
![Инна Вальтер - Звёздный вечер (Премьера клипа 2026)]() 3:48
3:48
![Ислам Итляшев - Мужское сердце (Премьера клипа 2026)]() 3:24
3:24
![AzaLi - Стерва (Премьера клипа 2026)]() 2:19
2:19
![Сергей Одинцов - Всю любовь тебе отдам (Премьера клипа 2026)]() 3:50
3:50
![NITI DILA - Белые лебеди (Премьера клипа 2026)]() 2:30
2:30
![Zомбилэнд: Контрольный выстрел | Zombieland: Double Tap (2019)]() 1:39:05
1:39:05
![Хищный рывок | Thrash (2026)]() 1:26:13
1:26:13
![Удачи, веселья, не сдохни | Good Luck, Have Fun, Don't Die (2025)]() 2:14:31
2:14:31
![Сестра | Siseuteo (2026)]() 1:26:45
1:26:45
![Обитель зла 3 | Resident Evil: Extinction (2010)]() 1:34:09
1:34:09
![Аватар: Пламя и пепел | Avatar: Fire and Ash (2025)]() 3:17:14
3:17:14
![Проект «Конец света» | Project Hail Mary (2026)]() 2:36:35
2:36:35
![Смертельно прекрасна | Pretty Lethal (2026)]() 1:30:46
1:30:46
![Грозовой перевал | Wuthering Heights (2026)]() 2:16:14
2:16:14
![В мгновение ока | In the Blink of an Eye (2026)]() 1:34:15
1:34:15
![Пицца фильм | Pizza Movie (2026)]() 1:37:12
1:37:12
![Компаньон | Companion (2025)]() 1:37:08
1:37:08
![Шары ввех | Balls Up (2026)]() 1:46:45
1:46:45
![Безымянная романтическая история о вторжении в дом | Untitled Home Invasion Romance (2025)]() 1:25:48
1:25:48
![Проект «Конец света» | Project Hail Mary (2026)]() 2:36:26
2:36:26
![Зараза | Cold Storage (2025)]() 1:39:05
1:39:05
![Веном: Последний танец | Venom: The Last Dance (2024)]() 1:48:59
1:48:59
![Необычайно умные создания | Remarkably Bright Creatures (2026)]() 1:54:04
1:54:04
![Эта штука работает? | Is This Thing On? (2026)]() 2:00:44
2:00:44
![Грандиозная подделка | Il falsario (2025)]() 1:55:41
1:55:41
![Зомби Дамб]() 5:14
5:14
![Мартышкины]() 7:10
7:10
![Мотофайтеры]() 13:10
13:10
![Чуч-Мяуч]() 7:04
7:04
![Пип и Альба Сезон 1]() 11:02
11:02
![Сборники «Оранжевая корова»]() 1:05:17
1:05:17
![Неодети]() 11:27
11:27
![Роботы-пожарные]() 12:31
12:31
![Герой внутри]() 1:09
1:09
![Врумиз. 1 сезон]() 13:10
13:10
![Кэрри и Супер Кола]() 1:08
1:08
![Зебра в клеточку]() 6:30
6:30
![Синдбад и семь галактик Сезон 1]() 10:23
10:23
![Сборники «Приключения Пети и Волка»]() 1:28:31
1:28:31
![Люк - путешественник во времени]() 1:19:50
1:19:50
![Паровозик Титипо]() 13:42
13:42
![Карли – искательница приключений. Древнее королевство]() 13:00
13:00
![Шахерезада. Нерассказанные истории Сезон 1]() 23:53
23:53
![Минифорс. Сила динозавров]() 12:51
12:51
![Оранжевая корова]() 6:30
6:30
![Лунтик | Танцы 💃💃💃 Сборник мультиков для детей]() 46:30
46:30
![Клипы 90-х. Русский сборник хитов]() 1:29:27
1:29:27
![Аватар: Путь воды (2022)]() 3:12:39
3:12:39
![Женщина лёгкого похудения - Уральские Пельмени]() 1:12:19
1:12:19
![Ми–Ми–Мишки 💫 Звездная история 🙃 Все серии ✨ Мультики для детей]() 2:10:31
2:10:31
![КАМИН 4К 🔥 FIREPLACE 4K | Звуки камина и Треск огня]() 2:00:00
2:00:00
![Сборник Топ 20 Номеров за 2024 год - Уральские Пельмени]() 2:52:30
2:52:30
![Давид | David (2025)]() 1:49:18
1:49:18
![ТОП ЛУЧШИХ КЛИПОВ ШАНСОНА - Слушать шансон лучшее.]() 3:48:45
3:48:45
![Рыцарь семи королевств. Все серии]() 3:28:06
3:28:06
![ANNA ASTI - ЦАРИЦА ( Премьера клипа 2023 )]() 4:01
4:01
![Алдан (2025)]() 1:38:04
1:38:04
![Инна Вальтер - Дымом лечилась (Исповедь хулиганки)]() 7:04
7:04
![Премьера: Предательство - фильм Андрея Медведева от 01.02.2026]() 59:17
59:17
![КОРОЛЬ и ШУТ /Сборник видеоклипов/]() 51:49
51:49
![Дева и дракон | Damsel (2024)]() 1:49:38
1:49:38
![Дьявол носит Prada 2 | The Devil Wears Prada 2 (2026)]() 1:51:51
1:51:51
![Антиреспект - Тишины хочу]() 4:33
4:33
![Сборник Новогодняя Десятка - Уральские Пельмени]() 1:19:08
1:19:08
![_*ДискотекА 80-90х ВиДео АлЬбом Лучшие.*_]() 2:40:60
2:40:60
13:10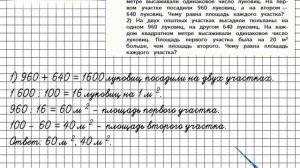

Скачать Видео с Рутуба по ссылке
| 256x144 | ||
| 640x360 |
 3:14
3:14
2026-05-02 00:31
 2:52
2:52
2026-04-23 10:50
 2:34
2:34
2026-04-23 11:07
 2:26
2:26
2026-04-23 13:18
 2:22
2:22
2026-05-15 10:20
 3:25
3:25
2026-04-30 11:44
 2:44
2:44
2026-05-10 12:47
 3:45
3:45
2026-04-29 14:24
 2:45
2:45
2026-04-23 11:37
 3:40
3:40
2026-05-16 13:00
 2:31
2:31
2026-05-16 13:10
 3:20
3:20
2026-04-25 16:09
 1:52
1:52
2026-05-15 13:19
 2:15
2:15
2026-04-17 12:38
 3:24
3:24
2026-05-16 13:20
 3:48
3:48
2026-05-15 10:08
 3:24
3:24
2026-05-15 09:58
 2:19
2:19
2026-04-23 11:42
 3:50
3:50
2026-04-21 10:41
 2:30
2:30
2026-04-28 09:53
0/0
 1:39:05
1:39:05
2026-05-04 12:32
 1:26:13
1:26:13
2026-04-29 20:33
 2:14:31
2:14:31
2026-03-12 23:32
 1:26:45
1:26:45
2026-03-27 13:34
 1:34:09
1:34:09
2026-02-25 19:41
 3:17:14
3:17:14
2026-04-02 11:34
 2:36:35
2:36:35
2026-04-11 16:06
 1:30:46
1:30:46
2026-03-28 23:09
 2:16:14
2:16:14
2026-04-20 11:54
 1:34:15
1:34:15
2026-03-01 21:54
 1:37:12
1:37:12
2026-04-06 12:20
 1:37:08
1:37:08
2026-05-07 15:10
 1:46:45
1:46:45
2026-04-22 00:25
 1:25:48
1:25:48
2026-02-26 14:41
 2:36:26
2:36:26
2026-05-12 16:55
 1:39:05
1:39:05
2026-05-07 15:06
 1:48:59
1:48:59
2026-05-07 15:08
 1:54:04
1:54:04
2026-05-12 16:55
 2:00:44
2:00:44
2026-05-04 16:12
 1:55:41
1:55:41
2026-02-26 14:41
0/0
 5:14
5:14
2024-11-28 13:12
 7:10
7:10
2025-12-30 18:33
 13:10
13:10
2024-11-27 14:57
 7:04
7:04
2022-03-29 15:20
2021-09-22 23:37
 1:05:17
1:05:17
2025-07-15 11:22
 11:27
11:27
2025-10-10 18:25
2021-09-23 00:12
 1:09
1:09
2026-04-03 12:21
2021-09-24 16:00
 1:08
1:08
2026-05-18 16:32
 6:30
6:30
2022-03-31 13:09
2021-09-22 23:09
 1:28:31
1:28:31
2026-03-05 13:25
 1:19:50
1:19:50
2024-12-17 16:00
 13:42
13:42
2024-11-28 14:12
 13:00
13:00
2024-11-28 16:19
2021-09-22 23:25
 12:51
12:51
2024-11-27 16:39
 6:30
6:30
2022-03-31 18:49
0/0
 46:30
46:30
2024-08-05 22:22
 1:29:27
1:29:27
2024-01-12 11:40
 3:12:39
3:12:39
2025-06-17 19:00
 1:12:19
1:12:19
2025-04-18 22:01
 2:10:31
2:10:31
2024-01-17 17:34
 2:00:00
2:00:00
2024-12-19 00:00
 2:52:30
2:52:30
2025-01-13 14:00
 1:49:18
1:49:18
2026-01-29 11:25
2026-02-02 14:57
 3:28:06
3:28:06
2026-02-24 11:12
 4:01
4:01
2023-10-12 11:54
 1:38:04
1:38:04
2026-03-26 23:45
 7:04
7:04
2018-07-11 11:26
 59:17
59:17
2026-02-01 14:02
 51:49
51:49
2022-09-14 19:48
 1:49:38
1:49:38
2024-03-12 00:19
 1:51:51
1:51:51
2026-05-06 10:53
 4:33
4:33
2019-12-02 21:15
 1:19:08
1:19:08
2026-01-01 13:59
 2:40:60
2:40:60
2024-03-18 17:25
0/0