 17:19
17:19
2024-11-28 19:06
 10:29
10:29
10:29
2023-12-03 18:04
 3:21:60
3:21:60
3:21:60
2026-01-11 22:40
 2:27:39
2:27:39
2:27:39
2025-12-28 21:17
 11:59:14
11:59:14
11:59:14
2025-12-11 08:06
 2:33:30
2:33:30
2:33:30
2023-09-10 20:33
 1:57:17
1:57:17
1:57:17
2025-12-20 21:00
 10:54:47
10:54:47
10:54:47
2025-12-26 07:13
 1:47:32
1:47:32
1:47:32
2025-12-24 09:18
 1:08:43
1:08:43
1:08:43
2026-01-12 11:21
 1:38:18
1:38:18
1:38:18
2025-12-30 18:00
 3:48:10
3:48:10
3:48:10
2023-09-18 01:16
 2:14:21
2:14:21
2:14:21
2025-12-21 23:50
 2:10:25
2:10:25
2:10:25
2023-09-10 21:03
 2:58:11
2:58:11
2:58:11
2023-09-20 15:09
 3:12:39
3:12:39
3:12:39
2023-09-15 21:20
 4:02:06
4:02:06
4:02:06
2025-01-04 02:00
 1:03:13
1:03:13
![Karen ТУЗ, Gaya Khan – Sirum Em Qez (Премьера 2025)]() 3:22
3:22
![DJ Прозрачный - Новый год (Премьера клипа 2025)]() 3:17
3:17
![Евгений Путилов - Леди ночь (Премьера клипа 2025)]() 3:33
3:33
![Дана Лахова - Камин (Премьера клипа 2025)]() 2:09
2:09
![ANIVAR - Маски (Премьера клипа 2026)]() 2:13
2:13
![Рада Рай - Мечта (Премьера клипа 2025)]() 4:43
4:43
![Игорь Кибирев - Белый снег (Премьера клипа 2025)]() 3:50
3:50
![Сергей Завьялов - Какой сегодня вечер (Премьера клипа 2025)]() 3:05
3:05
![SHAXO - Со мной играла (Премьера клипа 2025)]() 3:05
3:05
![Алмас Багратиони - Не бойся, я с тобой (Премьера клипа 2025)]() 3:15
3:15
![Виктория Качур - Жду тебя (Премьера клипа 2025)]() 3:40
3:40
![Бахтавар - Женушка-Аленушка (Премьера клипа 2025)]() 2:39
2:39
![Бекзод Жахон - Бухоро (Премьера клипа 2026)]() 4:44
4:44
![Надежда Мельянцева - Судьбы ирония (Премьера 2025)]() 3:02
3:02
![Соня Белькевич, ATLANA - Поверь (Премьера 2025)]() 3:59
3:59
![Сергей Одинцов - Пусть говорят (Премьера клипа 2025)]() 3:08
3:08
![Ферузбек Рахимов - Суймаганлар (Премьера клипа 2025)]() 4:10
4:10
![Merab Amzoevi - Плавно (Премьера 2025)]() 2:49
2:49
![Murat Gamidov - Ночь подруга (Премьера клипа 2025)]() 3:04
3:04
![Tural Everest - Бродячий хулиган (Премьера клипа 2025)]() 2:06
2:06
![Бегущий человек | The Running Man (2025)]() 2:16:29
2:16:29
![Дом из динамита | A House of Dynamite (2025)]() 1:55:08
1:55:08
![Гарри Поттер и Принц-полукровка | Harry Potter and the Half-Blood Prince (2009)]() 2:33:36
2:33:36
![Ловчий смерти | Deathstalker (2025)]() 1:42:60
1:42:60
![Франкенштейн | Frankenstein (2025)]() 2:32:29
2:32:29
![Гарри Поттер и Дары Смерти: Часть II | Harry Potter and the Deathly Hallows - Part 2 (2011)]() 2:10:30
2:10:30
![Голубая луна | Blue Moon (2025)]() 1:40:33
1:40:33
![Гарри Поттер и философский камень | Harry Potter and the Sorcerer's Stone (2001)]() 2:32:26
2:32:26
![Paзpушитeль миpoв | Worldbreaker (2025)]() 1:34:45
1:34:45
![Семейный план 2 | The Family Plan 2 (2025)]() 1:46:14
1:46:14
![Гарри Поттер и Кубок огня | Harry Potter and the Goblet of Fire (2005)]() 2:37:09
2:37:09
![Хищник: Планета смерти | Predator: Badlands (2025)]() 1:47:25
1:47:25
![Игры Биста. 2 сезон, 3 серия | Beast Games 2 season]() 57:01
57:01
![Гарри Поттер и Дары Смерти: Часть I | Harry Potter and the Deathly Hallows - Part 1 (2010)]() 2:26:10
2:26:10
![Супруги Роуз | The Roses (2025)]() 1:45:29
1:45:29
![Мерв | Merv (2025)]() 1:46:56
1:46:56
![Достать ножи: Воскрешение покойника | Wake Up Dead Man (2025)]() 2:26:20
2:26:20
![Гарри Поттер и Орден Феникса | Harry Potter and the Order of the Phoenix (2007)]() 2:18:19
2:18:19
![Гарри Поттер и Тайная комната | Harry Potter and the Chamber of Secrets (2002)]() 2:54:28
2:54:28
![Гедда | Hedda (2025)]() 1:48:23
1:48:23
![Панда и Антилопа]() 12:08
12:08
![Простоквашино. Финансовая грамотность]() 3:27
3:27
![Ну, погоди! Каникулы]() 7:04
7:04
![Оранжевая корова]() 6:30
6:30
![Команда Дино. Исследователи Сезон 2]() 13:26
13:26
![Монсики]() 6:30
6:30
![Пиратская школа]() 11:06
11:06
![Корги по имени Моко. Новый питомец]() 3:28
3:28
![Сборники «Умка»]() 3:09:60
3:09:60
![Сборники «Оранжевая корова»]() 1:05:01
1:05:01
![Отважные мишки]() 13:00
13:00
![Мотофайтеры]() 13:10
13:10
![Пакман в мире привидений]() 21:37
21:37
![Минифорс. Сила динозавров]() 12:51
12:51
![Сборники «Простоквашино»]() 1:05:30
1:05:30
![Полли Покет Сезон 1]() 21:30
21:30
![Супер Зак]() 11:38
11:38
![Роботы-пожарные]() 12:31
12:31
![Чемпионы]() 7:15
7:15
![Приключения Тайо]() 12:50
12:50
1:03:13
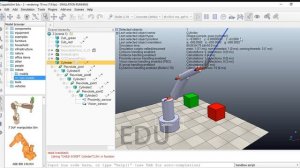
Скачать Видео с Рутуба / RuTube
| 256x144 | ||
| 1280x720 | ||
| 1920x1080 |
 3:22
3:22
2025-12-26 14:52
 3:17
3:17
2025-12-31 13:58
 3:33
3:33
2025-12-26 14:14
 2:09
2:09
2025-12-23 14:17
 2:13
2:13
2026-01-10 14:36
 4:43
4:43
2025-12-30 11:35
 3:50
3:50
2025-12-25 13:07
 3:05
3:05
2025-12-24 11:34
 3:05
3:05
2025-12-23 14:45
 3:15
3:15
2025-12-23 15:19
 3:40
3:40
2025-12-30 11:27
 2:39
2:39
2025-12-28 13:29
 4:44
4:44
2026-01-04 12:06
 3:02
3:02
2025-12-26 14:02
 3:59
3:59
2025-12-28 13:25
 3:08
3:08
2025-12-23 15:08
 4:10
4:10
2025-12-25 13:39
 2:49
2:49
2025-12-24 11:24
 3:04
3:04
2025-12-24 11:46
 2:06
2:06
2025-12-25 13:21
0/0
 2:16:29
2:16:29
2025-12-17 23:52
 1:55:08
1:55:08
2025-10-29 16:30
 2:33:36
2:33:36
2025-12-25 15:40
 1:42:60
1:42:60
2025-12-03 17:17
 2:32:29
2:32:29
2025-11-17 11:22
 2:10:30
2:10:30
2025-12-25 15:40
 1:40:33
1:40:33
2025-12-17 23:52
 2:32:26
2:32:26
2025-12-25 15:41
 1:34:45
1:34:45
2025-11-27 19:40
 1:46:14
1:46:14
2025-11-26 06:44
 2:37:09
2:37:09
2025-12-25 15:40
 1:47:25
1:47:25
2025-11-27 03:58
 57:01
57:01
2026-01-07 23:55
 2:26:10
2:26:10
2025-12-25 15:40
 1:45:29
1:45:29
2025-10-23 18:26
 1:46:56
1:46:56
2025-12-12 13:56
 2:26:20
2:26:20
2025-12-20 21:33
 2:18:19
2:18:19
2025-12-25 15:40
 2:54:28
2:54:28
2025-12-25 15:41
 1:48:23
1:48:23
2025-11-05 19:47
0/0
 12:08
12:08
2025-06-10 14:59
 3:27
3:27
2024-12-07 11:00
 7:04
7:04
2026-01-12 15:05
 6:30
6:30
2025-12-30 19:54
2021-09-22 22:54
 6:30
6:30
2022-03-29 19:16
 11:06
11:06
2022-04-01 15:56
 3:28
3:28
2025-01-09 17:01
 3:09:60
3:09:60
2025-12-11 18:53
 1:05:01
1:05:01
2025-12-12 12:24
 13:00
13:00
2024-11-29 13:39
 13:10
13:10
2024-11-27 14:57
 21:37
21:37
2024-11-28 17:35
 12:51
12:51
2024-11-27 16:39
 1:05:30
1:05:30
2025-06-27 13:20
2021-09-22 23:09
2021-09-22 22:07
2021-09-23 00:12
 7:15
7:15
2025-12-10 10:00
 12:50
12:50
2024-12-17 13:25
0/0