 0:43
0:43
2024-04-25 08:04
 0:35
0:35
0:35
2024-04-09 21:57
 3:22
3:22
3:22
2024-01-15 14:22
 2:46
2:46
2:46
2025-05-16 14:24
 3:30
3:30
3:30
2023-11-18 07:20
 2:32
2:32
2:32
2023-12-02 05:27
 1:52
1:52
1:52
2024-01-15 14:37
 4:15
4:15
4:15
2025-02-24 12:02
 16:34
16:34
16:34
2024-02-16 01:38
 19:60
19:60
19:60
2024-01-14 15:00
 3:40
3:40
3:40
2024-10-09 08:12
 4:17
4:17
4:17
2022-03-12 15:07
 4:15
4:15
4:15
2022-07-31 07:51
 5:17
5:17
5:17
2016-08-31 11:45
 12:24
12:24
12:24
2023-02-15 21:32
 4:27
4:27
4:27
2022-07-30 21:02
 0:41
0:41
0:41
2024-01-15 14:43
 3:40
3:40
![Tural Everest, Baarni - Ушедший покой (Премьера клипа 2025)]() 3:01
3:01
![Гор Мартиросян - 101 роза (Премьера клипа 2025)]() 4:26
4:26
![Руслан Гасанов, Роман Ткаченко - Друзьям (Премьера клипа 2025)]() 3:20
3:20
![Жасурбек Мирзажонов - Суймаганга суйкалдим (Премьера клипа 2025)]() 5:45
5:45
![ESCO - За тобой (Премьера клипа 2025)]() 2:13
2:13
![Roza Zərgərli, Мурад Байкаев - Неизбежная любовь (Премьера клипа 2025)]() 2:34
2:34
![Наталья Влади - Я обещаю (Премьера клипа 2025)]() 3:00
3:00
![Руслан Шанов - Особенная (Премьера клипа 2025)]() 2:16
2:16
![Антон Макарский - Не уходи (Премьера клипа 2025)]() 3:41
3:41
![Анжелика Агурбаш - Утро (Премьера клипа 2025)]() 3:33
3:33
![Gulinur - Nishatar (Official Video 2025)]() 3:40
3:40
![Сергей Одинцов - Девочка любимая (Премьера клипа 2025)]() 3:56
3:56
![Нодир Иброҳимов - Жоним мени (Премьера клипа 2025)]() 4:01
4:01
![Tural Everest - Ночной город (Премьера клипа 2025)]() 3:00
3:00
![Мужик из СИБИРИ (Александр Конев) - Не прощу (Премьера клипа 2025)]() 2:39
2:39
![Искандар Шокалонов - Дустларим (Премьера 2025)]() 4:00
4:00
![Bruno Mars ft. Ed Sheeran – Home to You (Official Video 2025)]() 3:25
3:25
![Magas - Только ты (Премьера клипа 2025)]() 3:04
3:04
![Alex Lim, Игорь Крутой - Вокзал (Премьера клипа 2025)]() 3:32
3:32
![KhaliF - Где бы не был я (Премьера клипа 2025)]() 2:53
2:53
![Фантастическая четвёрка: Первые шаги | The Fantastic Four: First Steps (2025)]() 1:54:40
1:54:40
![Школьный автобус | The Lost Bus (2025)]() 2:09:55
2:09:55
![Плохой Cанта 2 | Bad Santa 2 (2016) (Гоблин)]() 1:28:32
1:28:32
![Чёрный телефон 2 | Black Phone 2 (2025)]() 1:53:55
1:53:55
![Хани, не надо! | Honey Don't! (2025)]() 1:29:32
1:29:32
![Властелин колец: Возвращение бомжа | The Lord of the Rings: The Return of the King (2003) (Гоблин)]() 3:21:07
3:21:07
![Свинтусы | The Twits (2025)]() 1:42:50
1:42:50
![Большой куш / Спи#дили | Snatch (2000) (Гоблин)]() 1:42:50
1:42:50
![Пойман с поличным | Caught Stealing (2025)]() 1:46:45
1:46:45
![Супруги Роуз | The Roses (2025)]() 1:45:29
1:45:29
![Порочный круг | Vicious (2025)]() 1:42:30
1:42:30
![Рок-н-рольщик | RocknRolla (2008) (Гоблин)]() 1:54:23
1:54:23
![Цельнометаллическая оболочка | Full Metal Jacket (1987) (Гоблин)]() 1:56:34
1:56:34
![Бешеные псы | Reservoir Dogs (1991) (Гоблин)]() 1:39:10
1:39:10
![Только ты | All of You (2025)]() 1:38:22
1:38:22
![Французский любовник | French Lover (2025)]() 2:02:20
2:02:20
![Тот самый | Him (2025)]() 1:36:20
1:36:20
![Отчаянный | Desperado (1995) (Гоблин)]() 1:40:18
1:40:18
![Святые из Бундока | The Boondock Saints (1999) (Гоблин)]() 1:48:30
1:48:30
![Диспетчер | Relay (2025)]() 1:51:56
1:51:56
![Забавные медвежата]() 13:00
13:00
![Новогодние мультики – Союзмультфильм]() 7:04
7:04
![Супер Дино]() 12:41
12:41
![Сборники «Оранжевая корова»]() 1:05:15
1:05:15
![Тодли Великолепный!]() 3:15
3:15
![Папа Супергерой Сезон 1]() 4:28
4:28
![Умка]() 7:11
7:11
![Люк - путешественник во времени]() 1:19:50
1:19:50
![МиниФорс]() 0:00
0:00
![Космический рейнджер Роджер Сезон 1]() 11:32
11:32
![Мартышкины]() 7:09
7:09
![Команда Дино Сезон 2]() 12:31
12:31
![Игрушечный полицейский Сезон 1]() 7:19
7:19
![Корги по имени Моко. Домашние животные]() 1:13
1:13
![Сборники «Ну, погоди!»]() 1:10:01
1:10:01
![Панда и петушок Лука]() 12:12
12:12
![Команда Дино Сезон 1]() 12:08
12:08
![Пиратская школа]() 11:06
11:06
![Корги по имени Моко. Новый питомец]() 3:28
3:28
![Агент 203]() 21:08
21:08
3:40
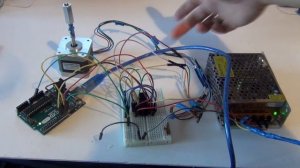
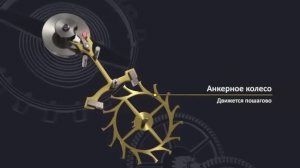
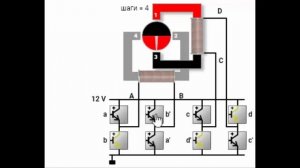
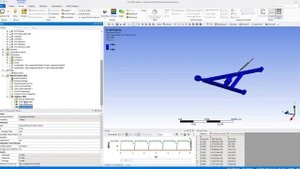
Управление шаговым двигателем через ARDUINO контроль угла и скорости поворота шаговых двигателей С++


Скачать видео
| 256x144 | ||
| 640x360 | ||
| 1280x720 | ||
| 1920x1080 |
 3:01
3:01
2025-10-31 13:49
 4:26
4:26
2025-10-25 12:55
 3:20
3:20
2025-10-25 12:59
 5:45
5:45
2025-10-27 13:06
 2:13
2:13
2025-10-31 12:20
 2:34
2:34
2025-11-05 11:45
 3:00
3:00
2025-11-03 12:33
 2:16
2:16
2025-10-31 12:47
 3:41
3:41
2025-11-05 11:55
 3:33
3:33
2025-11-02 10:06
 3:40
3:40
2025-10-31 13:38
 3:56
3:56
2025-10-28 11:02
 4:01
4:01
2025-11-02 10:14
 3:00
3:00
2025-10-28 11:50
 2:39
2:39
2025-10-30 11:00
 4:00
4:00
2025-11-02 10:12
 3:25
3:25
2025-11-02 10:34
 3:04
3:04
2025-11-05 00:49
 3:32
3:32
2025-10-31 15:50
 2:53
2:53
2025-10-28 12:16
0/0
 1:54:40
1:54:40
2025-09-24 11:35
 2:09:55
2:09:55
2025-10-05 00:32
 1:28:32
1:28:32
2025-10-07 09:27
 1:53:55
1:53:55
2025-11-05 19:47
 1:29:32
1:29:32
2025-09-15 11:39
 3:21:07
3:21:07
2025-09-23 22:52
 1:42:50
1:42:50
2025-10-21 16:19
 1:42:50
1:42:50
2025-09-23 22:53
 1:46:45
1:46:45
2025-10-02 20:45
 1:45:29
1:45:29
2025-10-23 18:26
 1:42:30
1:42:30
2025-10-14 20:27
 1:54:23
1:54:23
2025-09-23 22:53
 1:56:34
1:56:34
2025-09-23 22:53
 1:39:10
1:39:10
2025-09-23 22:53
 1:38:22
1:38:22
2025-10-01 12:16
 2:02:20
2:02:20
2025-10-01 12:06
 1:36:20
1:36:20
2025-10-09 20:02
 1:40:18
1:40:18
2025-09-23 22:53
 1:48:30
1:48:30
2025-09-23 22:53
 1:51:56
1:51:56
2025-09-24 11:35
0/0
 13:00
13:00
2024-12-02 13:15
 7:04
7:04
2023-07-25 00:09
 12:41
12:41
2024-11-28 12:54
 1:05:15
1:05:15
2025-09-30 13:45
 3:15
3:15
2025-06-10 13:56
2021-09-22 21:52
 7:11
7:11
2025-01-13 11:05
 1:19:50
1:19:50
2024-12-17 16:00
 0:00
0:00
2025-11-06 06:04
2021-09-22 21:49
 7:09
7:09
2025-04-01 16:06
2021-09-22 22:40
2021-09-22 21:03
 1:13
1:13
2024-11-29 14:40
 1:10:01
1:10:01
2025-07-25 20:16
 12:12
12:12
2024-11-29 14:21
2021-09-22 22:29
 11:06
11:06
2022-04-01 15:56
 3:28
3:28
2025-01-09 17:01
 21:08
21:08
2025-01-09 16:39
0/0